


Er zijn nog geen producten in jouw winkelwagen geplaatst.
een overweg maken | engelsmodelspoor.shop

Het maken van een overweg voor een modelbaan hoeft niet moeilijk te zijn.
Om een overweg te maken voor dubbelspoor heb ik de volgende materialen gebruikt:
- Smooth it van Woodland Scenics
- Stoeprand band van Woodland Scenics
- Markeerstift wit van Woodland Scenics
- Flexibel liniaal van Woodland Scenics
- Dwarsliggers van DCC concepts
- Soldeer
- vier korte stukjes code 75 rail
- Rol meetinstrument van DCC concepts
- 3 punts meetinstrument van DCC concepts
- Asfalt verf van Woodland Scenics
- Verf van Vallejo
- Karton
- zelf gemaakte overweghekken
- Vijlen
- Soldeerbout

Als eerste verwijder ik de kunststof dwarsliggers voor tenminste de breedte van de overweg. Deze vervang ik door vier dwarsliggers van DCC concepts die ik met een gelijkmatige tussenafstand neerleg. Hierna is het een kwestie van de dwarsliggers solderen aan de rails solderen. Tussendoor wel met bijvoorbeeld een 3 punts meetinstrument de afstand tussen de rails controleren.

Hierna heb ik de geleiderails aan de dwarsliggers gesoldeerd. Dit is een nogal nauwkeurig en lastig klusje. Dit laatste vooral omdat er weinig ruimte is voor een soldeerbout. Met een rol meetinstrument kan de tussenafstand goed gecontroleerd worden. Ik gebruik code 75 rail en heb daarom ook code 75 rail gebruikt voor de geleiderails. Vooral de afstand tussen geleiderail en rail zelf is erg belangrijk dat dit goed is. Is het te klein dan komt er geen trein meer overheen. Wel het begin en eind van iedere rail schuin afvijlen voor een mooi begin van de overweg.

Voor het geval je je afvraagt wat het zwarte blokje in het midden van de voorste rail is: het is een magneet voor ontkoppeling. Onder een overweg is een mooie plek om het te verstoppen. Nadat de geleiderails zijn gemonteerd is het tijd om de ondergrond van de weg voor te bereiden.

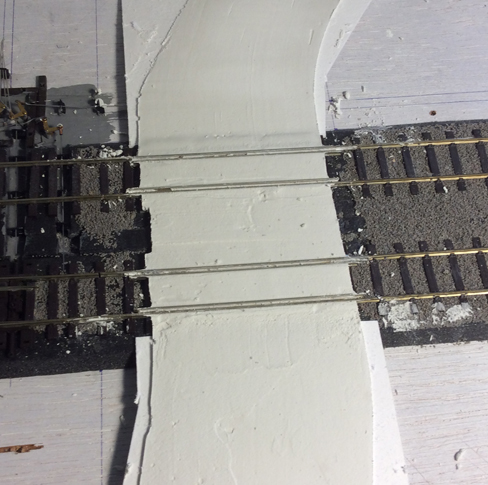
Met karton heb ik de bodem voor het asfalt gemaakt. De zijkanten zijn van Woodland Scenics stoeprand band. Om te voorkomen dat de Smooth-it weg gaat lopen heb ik aan voor- en achterkant heb ik nog tijdelijke schotjes van karton geplaatst.

Hierna heb ik de Smooth-it gemengd en gegoten. Tijdens het gieten en glad strijken heb ik zoveel mogelijk geprobeerd om ervoor te zorgen dat er geen, of in ieder geval zo min mogelijk, Smooth-it tussen rails en geleide rails terecht kwam. Direct na het gieten heb ik de ruimte tussen rails en geleide rails schoon gemaakt zodat daar geen Smooth-it achter bleef. Pas nadat ik hier tevreden over was heb ik de rest van de weg gegoten.
Ongeveer een half uur nadat de weg gegoten is kan stoeprand band voorzichtig verwijderd worden. Hierna de weg voor ten minste 24 uur laten drogen.

Met de volgend stappen begint het op een overweg te lijken. Te beginnen met de weg een asfalt kleur te geven met bijvoorbeeld Woodland Scencis asfalt verf.

Ook heb ik met Vallejo acryl verf de rails alvast verweerd (geweathered) .

Met het aanbrengen van de belijning en het plaatsen van de zelfgemaakte overweg hekken is de overweg compleet. De belijning aanbrengen heb ik gedaan met een flexibel lineaal van Woodland Scenics. Hier staan ook maatstreepjes, voor schaal N, HO en O, op voor de stippellijnen waardoor dit eenvoudig ook in een bocht eenvoudig te doen is.
Door de overwegbomen met servo's en een Arduino aan te sturen is er zelfs natuurgetrouwe beweging in te krijgen.
De code voor een Arduino heb ik hieronder toegevoegd.
/* The circuit:
- LED attached from pin 13 to ground (on board LED) only to confirm that something should happen
- pushbutton attached to pin A0 from +5V
- 10K resistor attached to pin A0 from ground
Servo wires:
- red: 5V : better to power servos wit separate power source with common ground with Arduino
- brown: ground
- orange: pin 7
- orange: pin 9 for the second servo
*/
#include <VarSpeedServo.h>
VarSpeedServo myservo; // create servo object to control a servo
VarSpeedServo myservo2; // create servo object to control a servo
const int buttonPin = A0; // the number of the pushbutton pin
const int ledPin = 13; // the number of the LED pin
int gate1start = 75; //start position of first servo
int gate1end = 178; // end postion of first servo
int gate2start = 65; // start position of second servo
int gate2end = 150; // end position of second servo
int buttonState = 0; // variable for reading the pushbutton status
int gatePos = 2; // varaible for remembering the state of the gates
void setup() {
// initialize the LED pin as an output:
pinMode(ledPin, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPin, INPUT);
myservo.attach(7); // attaches the servo on pin 7 to the servo object
myservo2.attach(9); // attaches the second servo on pin 9 to the servo object
}
void loop() {
buttonState = digitalRead(buttonPin); // read the state of the pushbutton value:
if (buttonState == HIGH) { // check if the pushbutton is pressed. If it is, the buttonState is HIGH:
// turn LED on:
digitalWrite(ledPin, HIGH);
if(!(gatePos==1)){
myservo2.write(gate2end,5,true); // move to x degrees, use a speed of 5, wait until move is complete
delay(2000); // wait 2 seconds
myservo.write(gate1end,5,true);
gatePos = 1; // variable to remember the position of the gates
delay(2000); // wait 2 seconds before gates close again if button is not pressed any more
}
} else {
// turn LED off:
digitalWrite(ledPin, LOW);
if(!(gatePos==0)){
myservo.write(gate1start,5,true);
delay(2000);
myservo2.write(gate2start,5,true);
gatePos = 0;
}
}
}
Aanvulling 7 december 2020:
U dient ook VarSpeedServo.h op uw Arduino te installeren. Hier staat tevens meer uitleg over de werking.